La ley del cuadrado como un problema de intercepción (EDOs, control y espacio-tiempo) - Part II
En la Parte I (discreto) el mensaje era: la “ley del cuadrado” no es magia, es una condición de alcanzabilidad con horizonte temporal. El tablero era \(\mathbb{Z}^2\), el tiempo eran turnos, y el “cuadrado” salía porque el rey se mueve con métrica \(L_\infty\).
En esta Parte II hacemos el límite continuo no para “aproximar el ajedrez”, sino para revelar la estructura matemática: perseguir un objetivo que se mueve, con velocidad acotada, antes de un deadline.
Idea guía (en una frase)
El rey genera un conjunto alcanzable que crece con el tiempo; el peón dibuja una trayectoria. Capturar es: “¿intersectan antes de \(T\)?”
0 · Notación y tres conceptos clave (sin los cuales esto parece brujería)
Antes de meter ecuaciones, aclaremos tres palabras que van a aparecer todo el rato:
EDO
Una ecuación diferencial ordinaria describe cómo cambia un estado con el tiempo: \(\dot{\mathbf{x}}(t)=f(\mathbf{x}(t),t)\). “Punto” encima significa derivada respecto de \(t\): \(\dot{x}=\dot{x}(t)\).
Control
En muchos sistemas, no hay una única dinámica: hay una familia de dinámicas según lo que eliges hacer. Eso se modela metiendo una variable \(\mathbf{u}(t)\) (“lo que decides”) dentro de la EDO.
Norma y bola
Una norma \(\|\cdot\|\) mide tamaño/distancia. La bola de radio \(r\) es el conjunto \(\{\mathbf{v}:\|\mathbf{v}\|\le r\}\). Con \(L_2\) la bola es un círculo; con \(L_\infty\) es un cuadrado.
La pregunta que sustituye a “¿llego en \(n\) jugadas?” es: ¿existe un tiempo \(t\) tal que puedo estar en ese punto cumpliendo mi límite de velocidad?
Traducción mental
Un turno discreto es como un “presupuesto de tiempo”. Al pasar a continuo, ese presupuesto se reparte a lo largo del intervalo: no saltas, te mueves con una velocidad máxima.
2 · El rey como sistema de control (EDO) y por qué aparece \(L_\infty\)
Aquí \(\mathbf{u}(t)=(u_x(t),u_y(t))\) es la velocidad elegida en cada instante. Para que esto sea “el mismo rey” que en discreto, imponemos una cota de velocidad que permita avanzar en diagonal sin penalización extra:
¿Por qué \(L_\infty\) y no \(L_2\)? Porque en el ajedrez discreto un paso diagonal cuesta lo mismo que uno recto. En continuo, eso equivale a permitir que \(x\) e \(y\) cambien “a la vez” hasta el mismo límite, sin que la diagonal sea “más cara”.
Qué significa físicamente \(\|\mathbf{u}\|_\infty \le v_k\)
Significa: “no puedo cambiar \(x\) más rápido que \(v_k\), ni cambiar \(y\) más rápido que \(v_k\)”. Como puedes empujar ambas a la vez, las direcciones extremas forman un cuadrado de velocidades.
3 · El peón: EDO sencilla + deadline
Para el peón usamos el caso “limpio”: avanza recto, a velocidad constante \(v_p\):
Integrar esa EDO es solo “sumar velocidad por tiempo”:
\[ \mathbf{p}(t)= \begin{pmatrix} x_p\\ y_p + v_p t \end{pmatrix}. \]
Y hay un horizonte temporal: coronación. Si la promoción ocurre en \(y=y_{\text{promo}}\) (en ajedrez, \(8\)):
\[ T=\frac{y_{\text{promo}}-y_p}{v_p}. \]
Por qué el deadline es el ingrediente que “hace” la ley del cuadrado
Sin deadline, esto sería “¿puedo interceptar en algún momento infinito?”. Con deadline, se vuelve “¿puedo interceptar antes de \(T\)?”. Esa restricción convierte una persecución temporal en una condición espacial inicial.
4 · Conjunto alcanzable del rey: el objeto que sustituye a “distancia”
La solución general del rey (integrando la EDO) es:
Esto ya es “la ley del cuadrado” en estado puro: a tiempo fijo \(t\), el rey cubre un cuadrado. El discreto era el mismo cuadrado, pero visto en píxeles.
Significa que tanto en \(x\) como en \(y\) puedes corregir como máximo \(v_k t\). Es la condición simultánea: \(|x-x_k^0|\le v_k t\) y \(|y-y_k^0|\le v_k t\). Eso es un cuadrado centrado en \(\mathbf{k}_0\).
5 · Captura = “¿la trayectoria del peón entra en el conjunto alcanzable?”
Capturar significa que en algún instante \(t\in[0,T]\) el rey y el peón coinciden:
Esto es exactamente el mismo patrón lógico que en discreto
Parte I: “\(\exists\) turno \(t\)” tal que “distancia discreta \(\le t\)”. Parte II: “\(\exists\) tiempo \(t\)” tal que “distancia inducida por velocidad \(\le t\)”. Cambian los objetos, no la lógica.
6 · De condición vectorial a desigualdades (math heavy, pero masticado)
Sustituimos la trayectoria explícita del peón: \(\mathbf{p}(t)=(x_p,\ y_p+v_p t)\). Para separar horizontal de vertical, definimos:
\[ a := |x_p - x_k^0|, \qquad b := y_p - y_k^0. \]
Comentario: \(a\) es separación lateral (siempre no negativa). \(b\) es separación vertical con signo: si \(b>0\), el peón está por encima; si \(b<0\), el rey está por encima.
La condición de captura se escribe:
\[ \|\mathbf{p}(t)-\mathbf{k}_0\|_\infty \le v_k t \quad\Longleftrightarrow\quad \max\big(a,\ |b+v_p t|\big)\le v_k t. \]
Esa desigualdad con \(\max\) se separa en dos más simples:
\[ a \le v_k t \quad\text{y}\quad |b+v_p t|\le v_k t. \]
La primera es inmediata:
\[ t \ge \frac{a}{v_k}. \]
La segunda es un valor absoluto; se abre en “doble desigualdad”:
\[ -v_k t \le b+v_p t \le v_k t. \]
Restamos \(v_p t\) en los tres lados:
\[ -(v_k+v_p)t \le b \le (v_k - v_p)t. \]
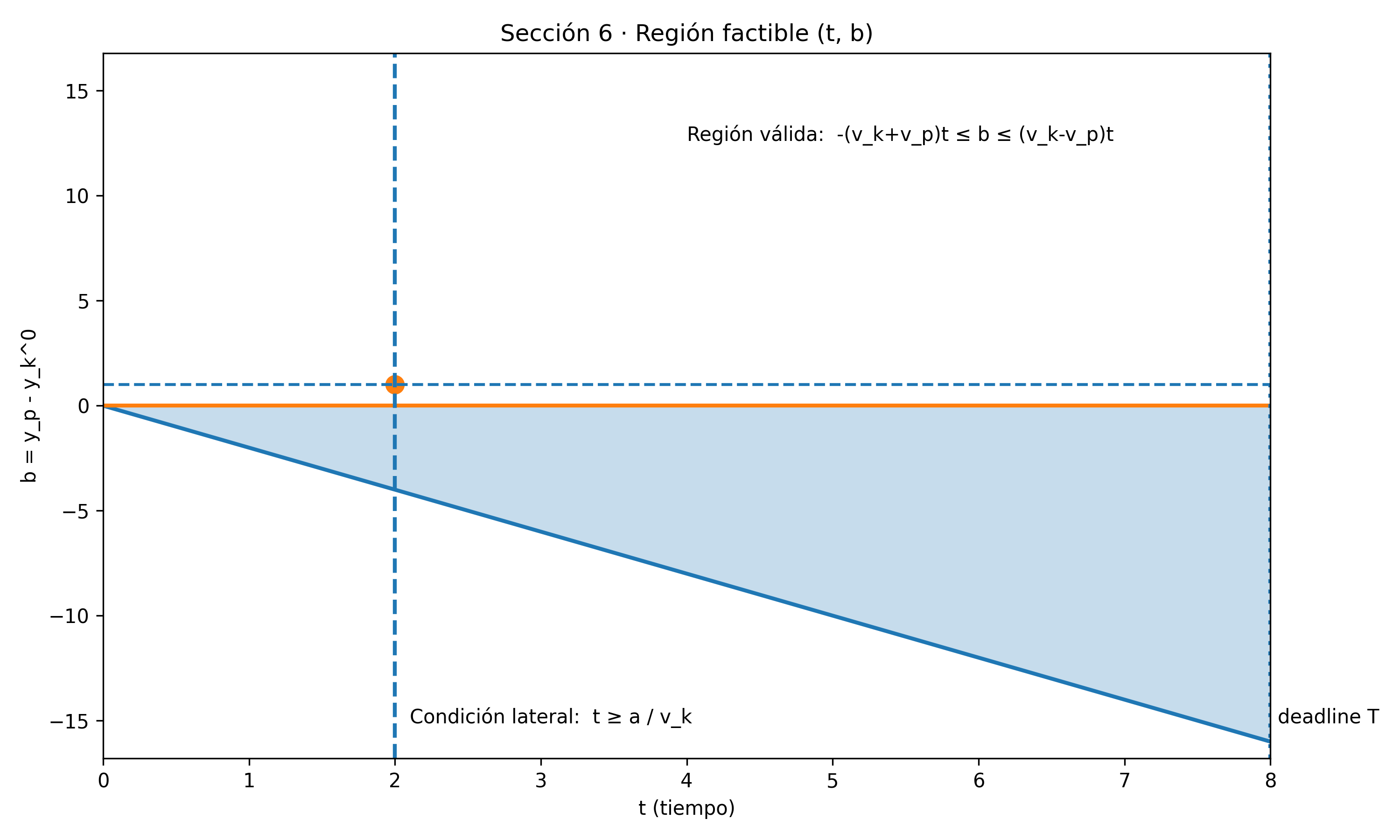
Gráfica · Región factible en el plano (t, b)
La franja sombreada representa los pares \((t,b)\) que satisfacen \(- (v_k+v_p)t \le b \le (v_k-v_p)t\). La línea vertical discontinua marca la condición lateral \(t \ge a/v_k\).
Interpretación: para un \(b\) dado, existe captura si su línea horizontal corta la región sombreada a algún \(t\) dentro del horizonte.
Aquí aparece el contenido dinámico real. La expresión \(v_k-v_p\) es la “ventaja de velocidad” del rey sobre el peón.
Lectura intuitiva de \(\;b \le (v_k-v_p)t\)
Si el peón empieza por delante (\(b>0\)), para alcanzarlo hace falta que el rey pueda “recortar” esa ventaja. Eso solo es posible si \(v_k>v_p\) (ventaja positiva). Si \(v_k=v_p\), el mejor escenario es no empeorar, pero no recortar.
7 · Recuperando la ley del cuadrado (caso ajedrez) sin esconder lo que está pasando
En el modelo estándar del final rey-peón “limpio”:
Con \(v_k=v_p\), la desigualdad vertical \(b \le (v_k-v_p)t\) se convierte en:
\[ b \le 0. \]
Esta es una consecuencia del modelo continuo idealizado: si ambos tienen el mismo límite de velocidad, el rey no puede recortar una desventaja vertical positiva “a largo plazo”. (En ajedrez real, el hecho de que el peón no capture hacia delante, y que el rey pueda tomar “atajos” por casillas específicas, añade matices; aquí estamos aislando la geometría básica.)
La regla operativa que se usa como heurística —y que coincide con la Parte I— se expresa así:
\[ \|\mathbf{p}(0)-\mathbf{k}_0\|_\infty \le T. \]
Por qué esto es literalmente “dibujar el cuadrado”
La condición \(\|\mathbf{p}(0)-\mathbf{k}_0\|_\infty \le T\) dice que el rey está dentro de la bola \(L_\infty\) de radio \(T\) alrededor del peón. Pero la bola \(L_\infty\) es un cuadrado. Así que “estar dentro del cuadrado” es exactamente esa desigualdad.
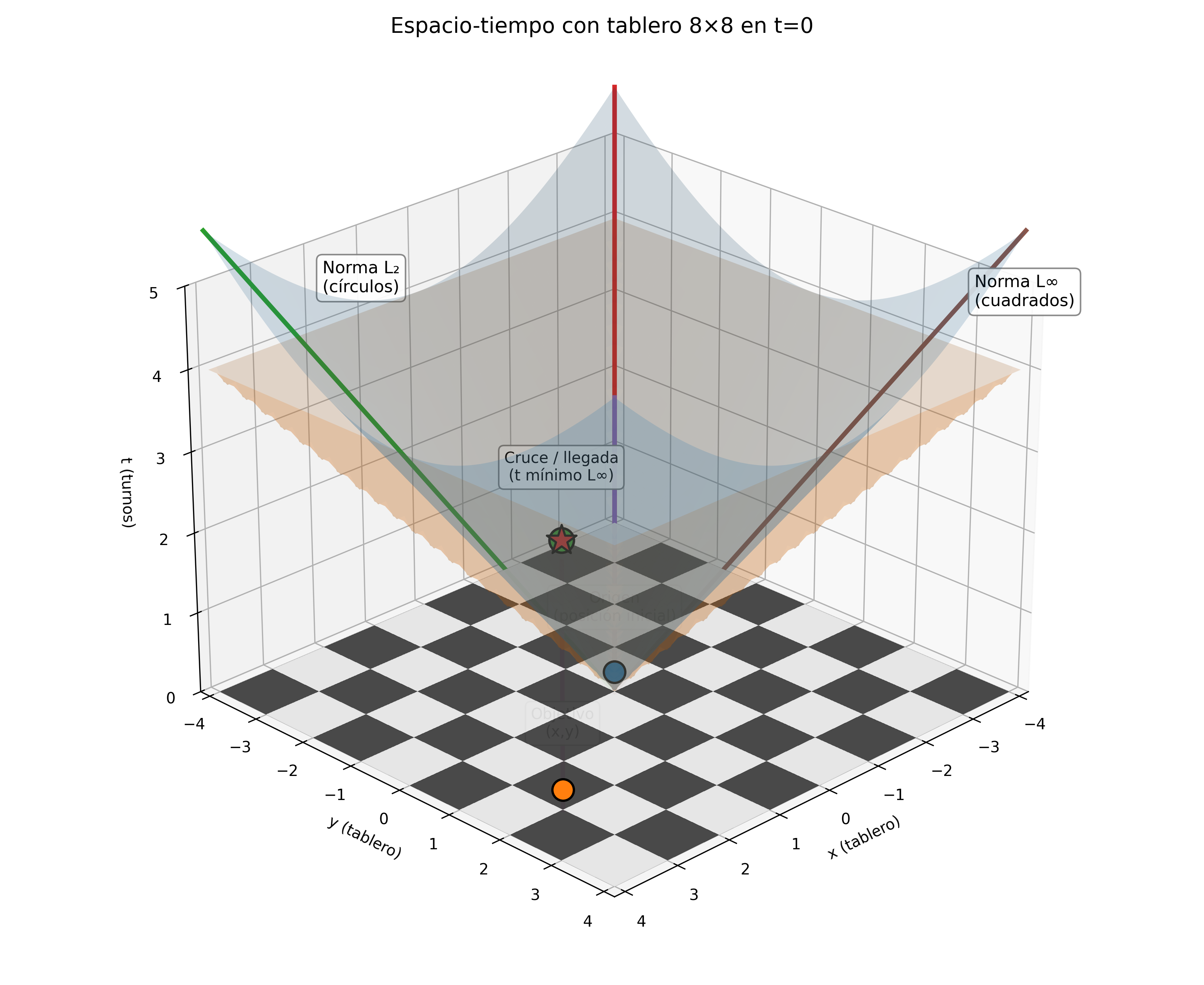
8 · Cono causal continuo: el dibujo mental correcto en 3D
Visualización geométrica en espacio-tiempo
El plano t=0 es el tablero. La pirámide representa la norma \(L_\infty\) (movimiento del rey) y el cono circular la norma \(L_2\).
En la Parte I hablábamos de “cono causal discreto” apilando regiones alcanzables por turno. En continuo el cono es literal: el conjunto de todos los puntos \((\mathbf{x},t)\) que el rey puede alcanzar a tiempo \(t\).
Si cortas el cono \(\mathcal{C}\) a tiempo \(T\), obtienes \(\mathcal{R}_k(T)\), un cuadrado. El “cuadrado del peón” es la proyección espacial de esa idea: “a tiempo \(T\), ¿estás dentro?”
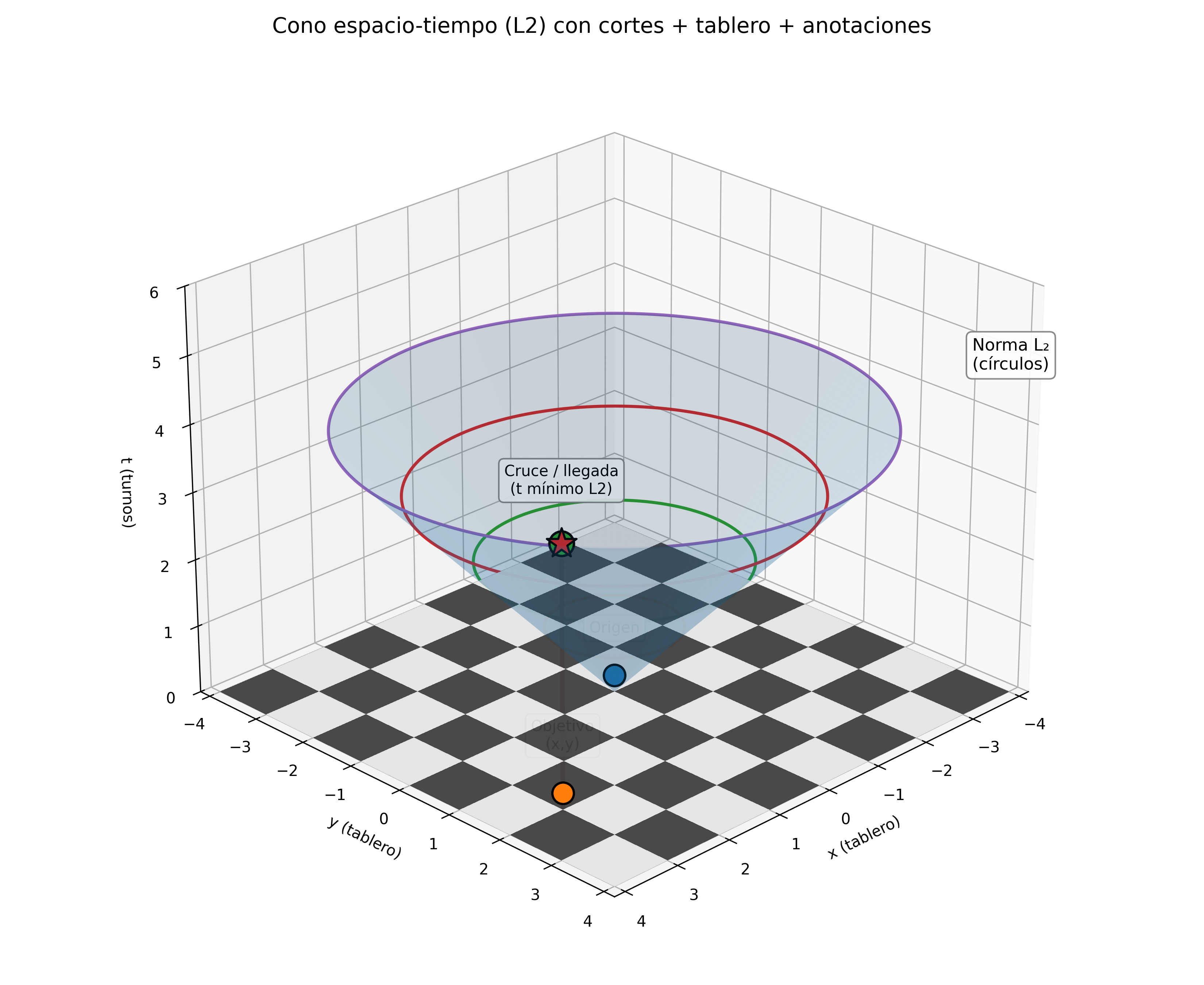
Cono causal continuo del rey
Cada sección horizontal representa el conjunto alcanzable a tiempo fijo bajo métrica \(L_2\). Los círculos muestran el crecimiento radial del frente causal.
El frente alcanzable crece linealmente con el tiempo: \( \|\mathbf{x}-\mathbf{k}_0\|_2 \le v_k t \).
9 · Bonus: de EDOs a Hamilton–Jacobi / Eikonal
Hasta aquí solo necesitamos EDOs. Pero hay otra forma de mirar lo mismo: en vez de perseguir una trayectoria concreta, describimos el tiempo mínimo para llegar a cualquier punto \(\mathbf{x}\).
Esta \(V\) satisface una ecuación tipo Eikonal (anisótropa) asociada a Hamilton–Jacobi. Una forma de verla (sin meternos en la teoría completa) es que la pendiente de \(V\) está limitada por la velocidad máxima, y la norma dual que aparece en el gradiente es \(L_1\).
\[ \|\nabla V(\mathbf{x})\|_1 = \frac{1}{v_k}. \]
Si en lugar de \(V\) describes un frente \(\phi(\mathbf{x},t)=0\) (una “frontera que se propaga”), su evolución satisface una PDE de propagación:
En una propagación isotrópica (norma \(L_2\)) el frente crece como círculos. Aquí el frente crece como cuadrados porque la métrica inducida por el control es \(L_\infty\). Es la misma historia, solo contada con el lenguaje de PDEs.
Resumen: en discreto dibujábamos un cuadrado; en continuo lo derivamos como sección de un cono alcanzable. Las ecuaciones añaden un detalle importante: el cuadrado no es una heurística arbitraria, sino el conjunto alcanzable de un sistema dinámico con control acotado en norma \(L_\infty\).
Si en la Parte I el argumento era “distancia discreta \(\le\) tiempo restante”, aquí es “norma inducida por velocidad \(\le\) deadline”. La ley del cuadrado es la misma desigualdad, vista desde dos resoluciones.